引言: 你正在规划一个智慧停车场项目,技术选型的第一个问题就让你犯了难:车位检测到底该用哪种技术?有人说本地识别速度快、不依赖网络,有人说云端分析算力强、能处理复杂场景;有人坚持传统视觉算法简单可靠、成本低,有人推崇深度学习准确率高、适应性强。面对这些相互矛盾的建议,你很可能陷入“选择瘫痪”——选错了不仅浪费预算,更可能导致系统上线后频繁出故障,运营方天天投诉,车主体验一塌糊涂。本文将站在客观中立的角度,从技术原理、检测精度、环境适应性、部署成本、响应速度、维护难度六个维度,对本地识别与云端分析、传统视觉与深度学习这两对技术路线进行全面对比,帮助你根据自身项目的实际情况,做出最明智的技术选型决策。
主体:多维度对比分析
技术路线一:本地识别 + 传统视觉算法
这是最早被应用于车位检测的技术路线,至今仍在大量项目中服役。它的工作原理是:在停车场现场部署摄像头或地磁传感器,采集到的数据在本地设备(如嵌入式处理器、工控机)上直接处理,通过预先设计的算法规则来判断车位是否被占用。
传统视觉算法的核心依赖“人工设计特征”。所谓人工设计特征,就是工程师手动编写规则,告诉计算机“什么样的情况算有车”。比如,检测车位线的边缘、检测车位的角点、分析图像中的纹理变化。以角点检测为例,系统会寻找车位框的四个角点,如果这些角点被遮挡或变形,就判定为有车停入。这种方法的优点是计算量小,对硬件要求低,一个几百元的嵌入式设备就能跑起来。地磁传感器则是另一种本地识别的代表,它通过检测车辆金属部件对地球磁场的扰动来判断车位状态,完全不依赖图像处理,功耗极低,一颗电池可以用3到5年。
从检测精度来看,传统视觉算法在理想条件下表现不错,准确率可以达到95%以上。但它的脆弱性也非常明显——因为所有的判断规则都是人预设的,一旦环境条件超出了规则的“认知范围”,系统就会出错。阴影是最常见的“骗子”,一个高对比度的树影落在空车位上,传统算法很可能把它误判为车辆,因为阴影的边缘和颜色变化符合“有物体”的特征。同样,雨天地面积水的反光、夜间低照度、摄像头镜头的污渍,都会让传统算法的准确率急剧下降。地磁传感器虽然不受光照影响,但它无法识别车牌,也无法判断车辆是否完全停入车位,还会受到地下金属管道、窨井盖等环境的干扰。
从部署和维护成本来看,传统视觉方案具有明显优势。摄像头加本地处理器的硬件成本可以控制在千元级别,地磁传感器的单价更低。由于所有处理都在本地完成,不需要购买云服务,也没有持续的流量费用。但维护方面有一个隐性成本:当环境变化导致误报率上升时,需要工程师到现场调试算法参数,无法远程快速优化。

技术路线二:云端分析 + 深度学习
这是近年来快速普及的新一代技术路线。它的工作原理是:摄像头采集图像后,通过网络将图像上传到云端服务器,由部署在云端的深度学习模型进行分析,再将识别结果返回给本地系统。与传统算法不同,深度学习不需要人工编写“什么样的图案算车”的规则,而是通过大量标注好的图像数据来训练神经网络,让模型自己学习“车”的特征。
深度学习的核心优势在于“鲁棒性”——也就是在各种复杂环境下都能稳定工作的能力。一个训练充分的深度学习模型,可以识别出部分遮挡的车辆、不同光照条件下的车辆、不同角度拍摄的车辆。研究表明,基于YOLO系列模型的车位检测系统,在结合像素级感兴趣区域选择后,平衡准确率可以达到99.68%。这意味着在10000次检测中,只有不到4次错误。深度学习还能处理传统算法完全无能为力的场景,比如车辆停歪了、跨线停车、大型SUV遮挡了相邻车位线等。
从环境适应性来看,深度学习完胜传统方案。它不受阴影、反光、雨天的显著影响,因为模型在训练阶段已经见过成千上万种不同的光照和天气条件下的图像。一项关于3D深度视觉的研究指出,传统2D系统测量的是“外观看不像有车”,而深度学习和3D感知测量的是“物理上是否真的有物体占据空间”,这是本质的区别。不过,深度学习也有它的“软肋”——它非常依赖训练数据的质量。如果训练数据中没有包含某种特殊场景(比如某一种罕见的光照角度),模型在面对这个场景时就可能出错。
部署成本是云端分析方案最大的痛点。首先,你需要购买云服务资源,包括GPU实例用于推理、存储空间用于保存图像、带宽用于传输数据。其次,每张上传的图像都会产生流量费用和API调用费用。对于一个每天进出数千辆车的中型停车场,每月的云服务费用可能在数千元级别。另外,网络依赖性也是一个现实问题——如果停车场网络中断,云端分析将完全失效。针对这个问题,业界提出了“云边端”混合架构:在本地部署边缘计算节点,网络正常时数据上传云端深度分析,网络中断时由本地轻量模型接管基本功能。

核心维度对比
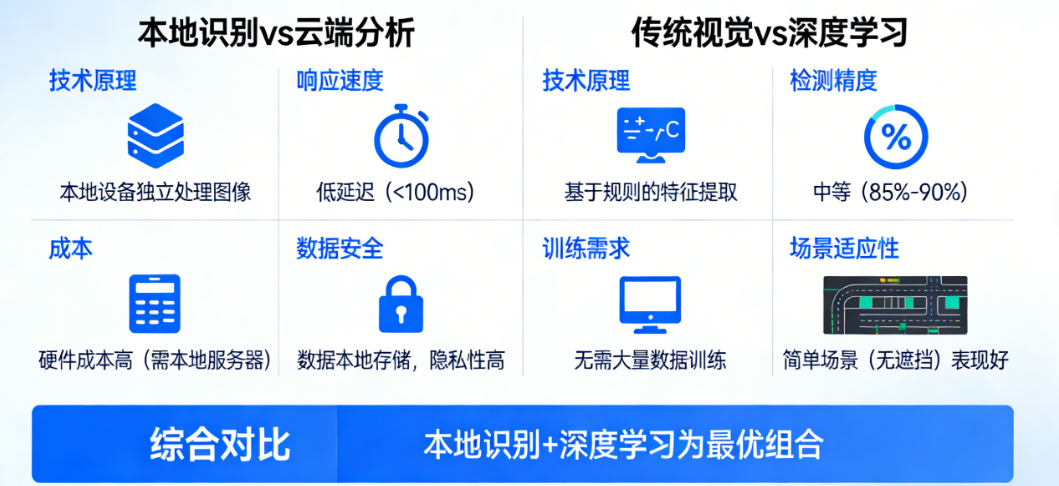
在检测精度方面,深度学习方案明显胜出。传统算法在理想条件下可以达到95%左右,但环境变化时可能骤降到70%以下;深度学习在各类环境下都能稳定维持在98%以上。这个差距对于计费场景至关重要——3%的误判率意味着每天有几十笔订单可能出错,长期积累的客诉成本和人工复核成本不容小视。
在环境适应性方面,深度学习同样占优。传统算法对光照、天气、阴影极其敏感,本质上是在用“视觉代理”推测物理状态;而深度学习结合3D感知后,可以直接测量车辆是否占据空间体积,从根本上消除了环境干扰。地磁传感器虽然不受光照影响,但无法解决车牌识别和停车姿态判断的问题。
在部署成本方面,传统方案更有优势。本地识别无需云服务费用,一次性硬件投入即可长期运行;云端分析需要持续的运营支出。但对于大型停车场项目,需要把“误判导致的人工成本”也计入总成本——深度学习虽然云服务费高,但可能因为准确率高而节省大量人工复核的开销。
在响应速度方面,本地识别天然占优。数据在本地处理,毫秒级返回结果;云端分析需要经过“上传-处理-回传”三个环节,网络延迟加上推理时间,通常需要几百毫秒到数秒。对于出入口闸机这种对实时性要求极高的场景,本地识别更有优势;对于车位引导屏这种对秒级延迟不敏感的场景,云端分析完全可以接受。
在维护升级方面,深度学习方案更有优势。传统算法的优化需要工程师到现场调试参数,而深度学习的模型可以在云端持续迭代——收集新的图像数据,重新训练模型,推送到边缘或云端,整个过程可以远程完成。这意味着系统的准确率可以随着运营时间的推移而不断提升,而不是像传统算法那样“上线即巅峰,之后只会变差”。
场景化决策建议
选择“本地识别+传统算法”,如果你的停车场满足以下条件:车位数量较少(50个以内),环境条件稳定(室内停车场,光照可控),预算极其有限,对检测精度的要求不高(可以接受5%左右的误差),没有车牌识别需求,且现场不具备稳定的网络条件。典型场景:小型社区地下车库、企业内部停车场。
选择“云端分析+深度学习”,如果你的停车场满足以下条件:车位数量较多(200个以上),存在复杂环境因素(露天、光照变化大、天气影响),对检测精度要求高(计费场景、无人值守),有车牌识别和数据分析需求,且具备稳定的网络连接。典型场景:大型商业综合体、机场火车站停车场、城市路侧停车位。
选择“云边端混合架构”,如果你希望在精度和成本之间取得平衡,同时保证网络中断时的可用性。这种架构下,边缘设备运行轻量级模型处理实时性要求高的任务,云端运行大模型处理复杂分析任务和模型训练。典型场景:连锁停车场运营商的标准化方案。
常见问答
问:深度学习方案一定比传统算法贵很多吗?
答:不一定。对于小规模项目,传统算法确实更便宜。但对于几百个车位的大型项目,深度学习虽然云服务费高,但能大幅减少人工复核和客诉处理成本。建议做一次全生命周期的成本测算,而不是只看初期投入。
问:我的停车场在地下,光照稳定,是不是传统算法就够了?
答:室内停车场确实减少了光照变化的干扰,但仍然存在阴影(立柱、相邻车辆投射)、反光(地坪漆)、遮挡等问题。如果这些因素在你的场景中不常见,传统算法可以胜任。但如果涉及无人值守计费,建议还是考虑深度学习——几单计费错误产生的客诉成本就可能超过技术升级的投入。
问:地磁传感器和视觉方案哪个更好?
答:两者解决不同的问题。地磁传感器擅长检测“有没有车”,精度可达99%,但无法识别车牌、无法判断停车姿态、无法提供图像证据。视觉方案可以做到这一切,但对环境更敏感。很多项目采用“地磁+摄像头”双模方案,用地磁检测状态,用摄像头抓拍车牌和取证。
问:边缘计算和本地识别是一回事吗?
答:不完全一样。本地识别通常指在摄像头或嵌入式设备上完成简单判断,不依赖网络。边缘计算则是指在停车场本地部署一台性能更强的计算设备(如边缘服务器),可以运行深度学习模型,同时与云端协同。边缘计算是本地识别和云端分析的中间形态。
最终结论与推荐
综合所有维度的对比,给出清晰的结论:对于追求高精度、强适应性、可远程维护的现代化停车场,云端分析+深度学习是未来的方向,尤其适合商业运营场景。对于预算有限、环境可控、精度要求不高的小型项目,本地识别+传统算法仍然是务实的选择。而“云边端混合”架构则代表了智慧停车技术演进的最优解——它兼具本地识别的低延迟和云端分析的强能力,正在成为大型停车场项目的标配。决策时请记住一个原则:评估系统的不准确带来的“隐性成本”,往往远高于你为提升准确率而多花的“显性投入”。
关于途傲科技:你的智慧停车项目最佳拍档
车位检测技术的选型只是智慧停车项目的第一步,后续的方案设计、设备选型、系统集成、施工调试,每一个环节都需要专业的团队来执行。如果你正在规划智慧停车场项目,或者需要为现有系统做技术升级,途傲科技能帮你快速找到合适的服务商。你可以在“任务大厅”免费发布“车位检测系统开发”或“智慧停车解决方案”需求,详细描述你的停车场规模、环境条件和功能要求,百万级认证服务商将为你精准竞标,提供从技术选型到系统落地的完整方案。如果你更倾向于主动寻找,不妨去“人才大厅”搜索“嵌入式开发”、“深度学习工程师”、“智慧停车系统集成”等关键词,平台的AI智能匹配系统会根据你的项目特点推荐经验最匹配的个人或团队。在“服务大厅”和“商铺案例”中,你可以看到海量真实成交的智慧停车项目案例,参考他们是如何在不同技术路线之间做选择、如何控制成本、如何应对各种现场挑战的。别忘了学习“雇主攻略”中的发包和项目管理技巧,在“一品商城”选购标准化的车位检测设备,或是开通“V客优享”会员享受订单直推和专属客服。途傲科技汇聚千万服务商,用数智化平台彻底改变你的项目采购方式,从技术选型到落地交付,这里总有最专业的团队帮你把方案变成现实。

